

ロボットハンド設計
現在、産業用ロボットは産業界において無くてはならない存在になってきています。産業用ロボットにとって、ロボットハンドは確実かつ正確な作業を確保するための重要な要素です。ロボットハンドにはさまざまな種類があり、作業に合ったハンドを選定する必要があります。当社では対象物や作業内容に合うように検討・設計・製作をおこないます。ハンド設計の一例をご紹介します。

パレタイズ用ハンド
段ボールパレタイズ用のハンドです。要求される段ボールサイズにより、都度設計をおこないます。
真空や把持など多種対応可能です。
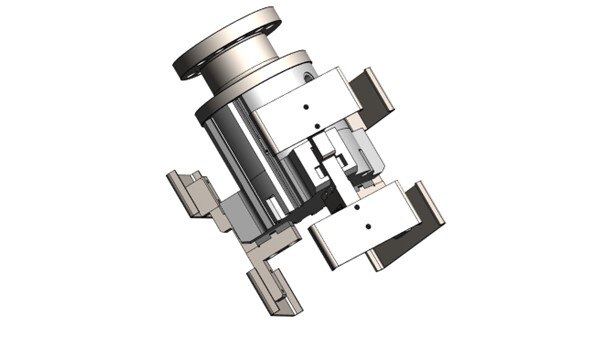
円筒形把持ハンド
パイプなどの円筒形ワークを把持するハンドです。後工程の加工状況により、ワークの内側や外側を把持することが出来ます。

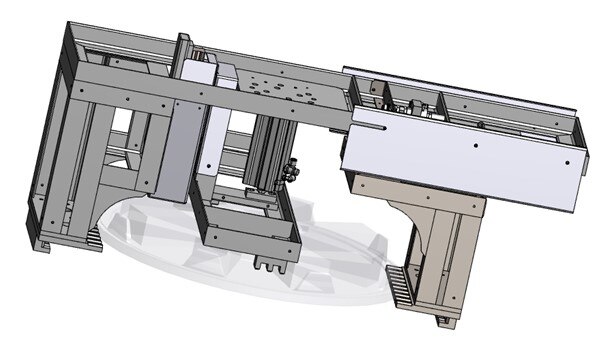
マルチハンド
ワークのズレを画像認識にて位置ズレを確認させ、対象ワークを把持・吸着させて治具への組み込みなどおこなうハンドです。
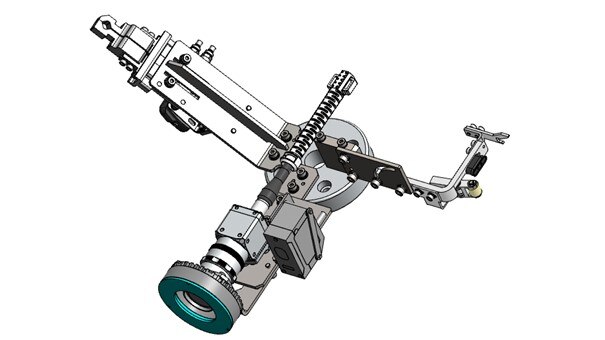
マルチハンド
画像認識及び変位センサにてワーク位置を認識し、対象ワークを把持・吸着・フックすることで治具への組み込みなどおこなうハンドです。
鋳物自動塗装用ハンド
鋳物蓋の様な円盤形のワークを掴むハンドです。加熱炉から鋳物蓋を取り出し、冷却・塗装・乾燥をおこなう装置に運ぶためのハンドです。

検体容器・ハンドラックハンドリング用ハンド
最大5本の検体容器を同時に運ぶことができます。爪はシールが貼り付きにくい表面処理をおこなっているため、検体容器に貼り付けたシールによる影響を軽減しています。
お問い合わせ
お電話はこちら。小さなことでもお気軽にご相談ください。
平日9:00~17:00
Webでのお問合せは、こちらのフォームにご記入ください。(1分)
フォームが表示されるまでしばらくお待ち下さい。
恐れ入りますが、しばらくお待ちいただいてもフォームが表示されない場合は、こちらまでお問い合わせください。
CONTACT
生産現場の監視や自動制御でお困りの際は
マツシマメジャテックへご相談ください。
ご不明な点はお気軽に
お問い合わせください
お問い合わせください
各サービス資料の
ダウンロードはこちら
ダウンロードはこちら

